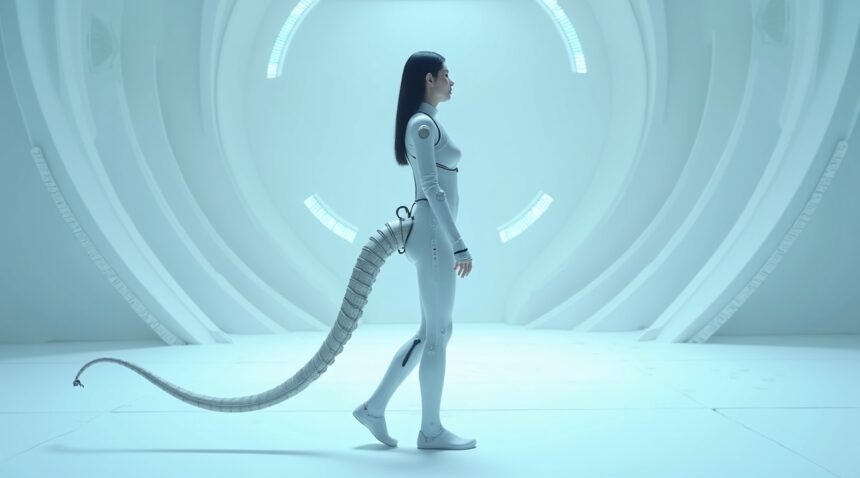
Japanese researchers at Keio University have unveiled the Arque, a groundbreaking robotic tail that draws inspiration from seahorse anatomy and pneumatic muscle technology to enhance human balance during movement.
Key Takeaways
- Biomimicry-Based Design: The Arque robotic tail mimics animal balance mechanisms using a seahorse-inspired interlocking vertebrae structure that provides optimal strength and flexibility.
- Advanced Actuation System: Powered by four pneumatic artificial muscles, the tail delivers eight movement directions in real-time response to shifts in the user’s center of gravity via smart sensors.
- Customizable Modularity: The tail’s segments can be added or removed, allowing adjustments in length and weight from 24 to 184 grams per vertebra, adapting to individual body types and balance requirements.
- Diverse Industry Applications: Beyond elderly mobility support, Arque has potential in sectors such as warehousing, construction, physical rehabilitation, virtual reality, and professional training environments.
- Prototype Stage Development: Although promising, Arque is still under development, with researchers focusing on improving weight, size, and everyday usability before it can be brought to market.
Nature-Inspired Engineering
The Arque’s foundational design stems from the biological structure of the seahorse’s tail, renowned for its exceptional stability and flexibility. Researchers used this inspiration to create an interlocking vertebrae system that balances motion freedom with structural cohesion. The result is a wearable tail that moves in multiple directions while maintaining the necessary support forces for balance correction.
Pneumatic Muscles and Smart Response
The tail operates primarily through four pneumatic artificial muscles that control movement across eight axes. These muscles respond within milliseconds, thanks to embedded smart sensors that read the wearer’s shifting center of mass. As balance is compromised—whether during gait changes, rapid motion, or unexpected disturbances—the Arque reacts instantly to stabilize posture and assist human motion.
Adaptable and Modular Design
One of Arque’s strengths is its modularity. Users can tailor the tail to their specific body shape and balance needs by attaching or detaching individual vertebrae. Each segment varies in weight from 24 to 184 grams, giving users precise control over the tail’s performance characteristics. This adaptability makes it suitable for both light and heavy-duty use cases, depending on the environment and objectives.
Applications Across Multiple Fields
Elderly Assistance
With Japan’s aging population projected to exceed one-third by 2025, Arque has the potential to significantly aid seniors with mobility and fall prevention. It may provide the kind of physical support that helps reduce injury risk and preserve independence.
Labor and Industrial Use
In physically demanding workplaces like warehouses and construction zones, Arque can support enhanced balance during lifting, climbing, or navigating uneven ground—decreasing fatigue and injury risks.
Rehabilitation and Healthcare
Rehab facilities could use Arque during physical therapy to retrain the body’s balance systems, especially for stroke survivors or individuals recovering from lower limb injuries.
Virtual Reality and Gaming
Interactive digital environments often cause disorientation or motion imbalance. Arque can enhance immersion by stabilizing a user’s physical position in response to their virtual movements, increasing comfort and reducing motion sickness.
Professional and Athletic Training
Professionals operating in high-risk scenarios—like firefighters or military personnel—may benefit from the additional proprioceptive feedback and balance control. Athletes could also train with Arque to enhance spatial awareness and core stability under dynamic conditions.
Prototype Challenges and Future Improvements
Despite its innovative design, the current Arque prototype has limitations. Its one-meter length may hinder practicality in crowded or domestic environments, and the pneumatic actuation system adds complexity that may affect long-term maintenance. Miniaturization and increased energy efficiency are key research focuses to ensure the tail becomes suitable for daily use.
Hybrid actuation systems—where pneumatic muscles might be combined with electric components—are under consideration to maintain responsiveness while improving durability and reliability. Increasing energy efficiency and battery longevity will also be critical to commercial success.
Market Readiness and Potential Obstacles
Although no official release timeline has been announced, the Keio University team continues refining the Arque system for real-world use. Market introduction hinges on achieving functionality, reduced weight, affordability, and user-friendly design. Moreover, public acceptance of wearable balance-enhancement tech will depend on how seamlessly the device integrates into daily life—without social discomfort or physical inconvenience.
Manufacturing costs remain another barrier. Currently, Arque consists of precision-machined mechanical links and pneumatic elements, which may drive up production pricing. For wide accessibility, cost-effective alternatives and mass-production strategies will be necessary.
Conclusion
Arque represents a significant step in the evolution of human augmentation tools. Whether in eldercare, industrial environments, or immersive digital experience, its potential is vast. With continued research and refinement, this innovative robotic tail may soon move beyond concept, offering real-world solutions to enhance human balance and mobility. For more information on the project from Keio University, you can explore the official Arque research page via this link.
Scientists Create Meter-Long Robotic Tail That Mimics Animal Balance Systems
Japanese researchers at Keio University have engineered a revolutionary wearable device called Arque that transforms how humans maintain balance during movement. This meter-long robotic tail draws its design principles directly from nature’s most successful balancing systems, creating a practical solution for human stability challenges.
The Arque system employs biomimicry to replicate the sophisticated balance mechanisms found in various animals. Cheetahs use their tails as dynamic counterweights during high-speed pursuits, while monkeys rely on their appendages for stability when swinging through trees. The engineering team studied these natural systems extensively to understand how animal tails function as living gyroscopes.
Seahorse-Inspired Engineering Design
The device’s architecture takes direct inspiration from the seahorse tail, which features a unique boxy structure with interlocking vertebrae. This design provides an exceptional combination of strength and flexibility that engineers rarely achieve in artificial systems. The seahorse’s tail can compress under pressure while maintaining its structural integrity, making it an ideal model for a wearable robotic device.
Keio University’s research team recreated this natural engineering marvel using modern materials and robotics technology. The Arque tail incorporates similar interlocking segments that allow for fluid movement while providing substantial support. Each segment can adjust independently, creating a responsive system that adapts to the wearer’s movements in real-time.
The wearable robotics technology behind Arque represents a significant advancement in human augmentation devices. Unlike static support systems, this robotic tail actively responds to changes in the wearer’s center of gravity. The device continuously calculates optimal positioning to counteract destabilizing forces, much like how robots adapt to environmental challenges.
Potential Applications of Balance Technology
Balance technology applications for this innovation extend far beyond basic stability assistance. Some promising use cases include:
- Elderly individuals: Enhanced mobility and reduced fall risk during daily activities.
- Construction workers: Improved safety and balance on hazardous job sites, especially at heights.
- Athletes: Advanced training support to improve balance and performance in sports such as gymnastics, parkour, or skiing.
The Arque system demonstrates how nature-inspired solutions can address complex human challenges. By studying millions of years of evolutionary refinement in animal balance systems, researchers created a device that enhances human capabilities rather than simply replacing them. This approach to wearable technology suggests exciting possibilities for future human augmentation projects.
https://www.youtube.com/watch?v=hg-3B23Q7yY
How the One-Meter Tail Works With Pneumatic Muscles and Smart Sensors
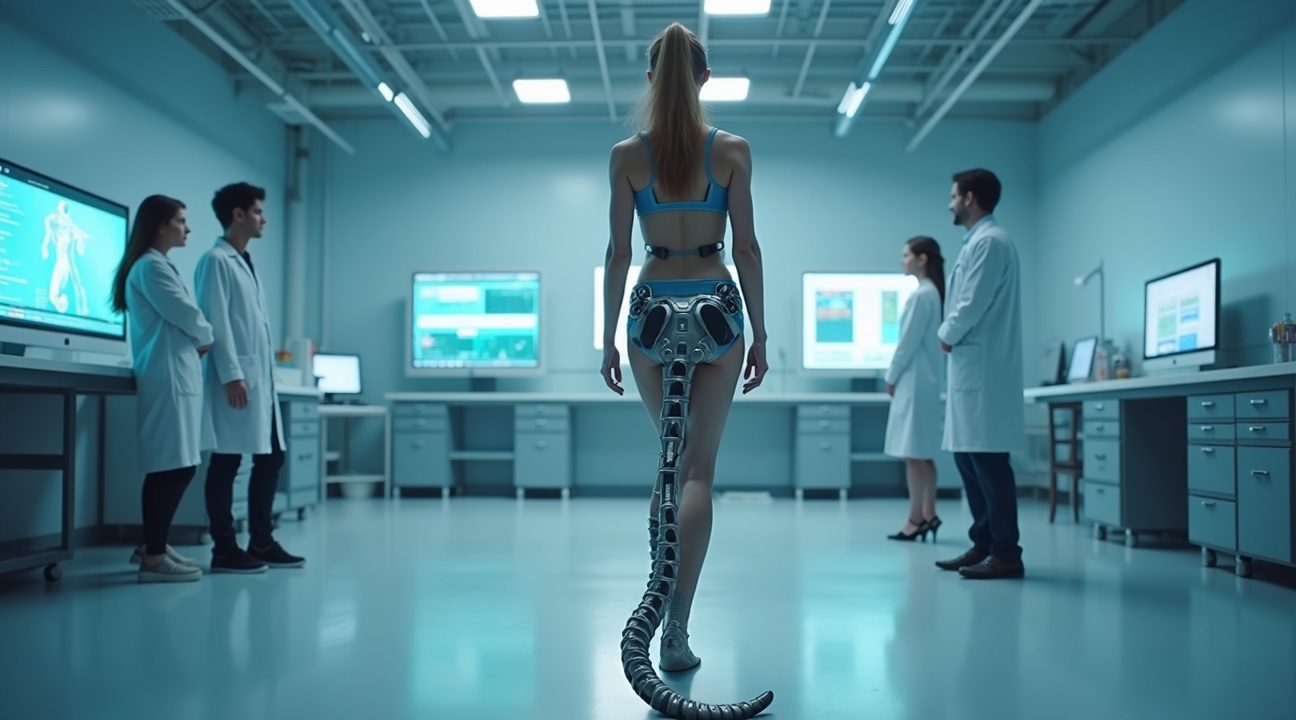
Japanese researchers have engineered a sophisticated balance-assistance device that extends approximately three feet from the wearer’s body. I find the modular design particularly impressive, built with interlocking plastic vertebrae that create a flexible yet controlled appendage.
Modular Design and Weight Distribution
The tail’s adjustable nature sets it apart from rigid wearable robotics solutions. Each vertebra weighs between 24 grams and 184 grams, allowing users to customize both length and total weight according to their specific needs. This flexibility means individuals can experiment with different configurations to find their optimal balance point.
Users can add or remove segments to match their physique and balance requirements. A shorter person might prefer fewer vertebrae for better proportional balance, while taller individuals could benefit from the full length. This adaptability makes the device suitable for various body types and walking conditions.
Pneumatic Muscle Technology and Movement Control
Four pneumatic artificial muscles drive the tail’s movement, powered by compressed air that enables precise directional control. I appreciate how this system provides eight distinct movement directions, creating a responsive counterbalancing mechanism that adapts to the wearer’s motion patterns.
The pneumatic muscles offer several advantages over traditional motors:
- Lightweight construction reduces overall device burden
- Smooth, natural movement patterns that mimic biological motion
- Quick response times for real-time balance corrections
- Energy-efficient operation compared to electric alternatives
- Silent operation that won’t distract the user
A body tracker continuously monitors changes in the wearer’s center of gravity, sending signals to the pneumatic system for immediate adjustments. This smart sensor technology ensures the tail responds before balance issues become problematic, much like how animals naturally use their tails for stability.
The spring-based structure handles shearing and tangential forces effectively, providing both rigidity when needed and adaptability during complex movements. This engineering approach allows the tail to maintain its supportive function while accommodating the natural variations in human gait and posture.
The harness attachment system distributes the tail’s weight evenly across the wearer’s waist, preventing pressure points that could cause discomfort during extended use. I notice this design consideration makes the device practical for daily activities rather than just laboratory demonstrations.
The compressed air system operates quietly and efficiently, making it suitable for indoor and outdoor environments. Users won’t experience the noise issues common with electric motor systems, and the pneumatic approach provides more natural movement patterns that complement human locomotion.
This technology represents a significant advancement in assistive robotics, similar to recent innovations like liquid-form robotics that demonstrate how flexible design approaches can solve complex engineering challenges. The tail’s ability to provide real-time balance correction could benefit elderly individuals, those recovering from injuries, or anyone working in environments where stability is crucial.
The artificial muscles respond within milliseconds to balance shifts, creating a seamless integration between human movement and robotic assistance. This rapid response capability ensures users maintain their natural walking rhythm while receiving the support they need for improved stability and confidence.
https://www.youtube.com/watch?v=4a_N2v5bbAc
Addressing Japan’s Aging Crisis Where One Third Will Be Over 65 by 2025
Japanese engineers developed this innovative robotic tail specifically to address their country’s rapidly aging population. By 2025, an astounding one-third of Japan’s population will be over 65 years old, creating unprecedented challenges for mobility and independence among elderly citizens.
The timing of this technology couldn’t be more critical. Falls represent one of the leading causes of injury and hospitalization among older adults, often resulting in a devastating loss of independence. This robotic tail directly tackles this problem by providing continuous balance support, potentially preventing countless accidents and maintaining quality of life for millions of Japanese seniors.
Japan’s Unique Approach to Demographic Solutions
Japan has chosen a distinctly different path compared to other developed nations facing similar aging populations. While countries like Germany and Canada address shrinking workforces through increased immigration, Japan remains committed to technological innovation as their primary solution. This robotic tail exemplifies Japan’s philosophy of using advanced robotics to support an aging society rather than relying on external demographic changes.
The implications extend far beyond individual users. Healthcare costs associated with fall-related injuries place enormous strain on Japan’s medical system, and mobility-assistance technology like this tail could significantly reduce these expenses. Additionally, maintaining elderly independence allows families to remain productive in the workforce rather than becoming full-time caregivers.
Japan’s approach reflects a broader trend I’ve observed in Japanese innovation – creating solutions that work within existing cultural frameworks rather than forcing societal adaptation. The robotic tail allows elderly individuals to maintain their dignity and independence while receiving the physical support they need.
This technology also represents a stepping stone for more advanced mobility assistance. As researchers continue refining balance-enhancement systems, future iterations might incorporate advanced robotic capabilities that could revolutionize elderly care.
The demographic pressure driving this innovation shows no signs of slowing. Japan’s commitment to robotics as a solution for aging-related challenges positions them at the forefront of assistive technology development. Other countries watching Japan’s demographic transition will likely adopt similar technological approaches as their own populations age.
This robotic tail development signals Japan’s determination to maintain productivity and quality of life despite unprecedented demographic shifts. Rather than viewing population aging as an insurmountable challenge, Japanese researchers are transforming it into an opportunity for groundbreaking innovation that could benefit elderly populations worldwide.

From Warehouse Workers to Virtual Reality Gaming Applications
The robotic tail’s potential extends far beyond basic mobility assistance, with industrial applications offering immediate practical benefits. I see significant opportunities for warehouse workers who regularly handle heavy packages, boxes, and equipment that can throw off their center of gravity. The counterbalancing effect could reduce workplace injuries and improve efficiency during physically demanding tasks like loading trucks or stacking inventory on high shelves.
Manufacturing environments present another compelling use case, where workers often carry tools, parts, or materials while maintaining precise positioning. The tail could provide stability during assembly line work or when operating in tight spaces where traditional safety equipment might be cumbersome. Construction sites could also benefit, particularly for workers on scaffolding or uneven terrain where balance is critical for safety.
Rehabilitation and Medical Applications
The medical field presents some of the most promising applications for this balancing technology. I anticipate significant benefits for stroke patients, who often struggle with balance and coordination during recovery. The haptic feedback capabilities could help retrain their nervous systems while providing physical support during walking practice sessions.
Physical therapy clinics could integrate the robotic tail into treatment protocols for various conditions. Patients recovering from leg injuries, hip replacements, or neurological disorders would benefit from the additional stability while rebuilding strength and confidence. The technology could accelerate rehabilitation timelines by allowing patients to attempt more challenging exercises safely.
Balance disorders affecting elderly patients could also be addressed through this innovation. Rather than relying solely on walkers or canes, the tail offers a more natural solution that doesn’t require gripping or arm strength. This could be particularly valuable for individuals with arthritis or limited upper body mobility.
Virtual Reality and Gaming Integration
The entertainment industry stands to gain substantially from this balancing technology, particularly in virtual reality applications. I envision gaming experiences where the robotic tail responds to in-game movements, creating unprecedented immersion levels. Players could feel the weight shift of carrying virtual objects or experience the sensation of climbing digital mountains through realistic haptic feedback.
VR fitness programs could incorporate the tail to simulate various physical activities safely. Users might experience rock climbing, surfing, or skiing without leaving their living rooms, with the tail providing authentic balance challenges and feedback. This could revolutionize home fitness by making virtual workouts more engaging and effective.
Theme parks and entertainment venues could create entirely new attraction categories using this technology. Flying experiences could feel more realistic with proper counterbalancing, while motion simulators could provide enhanced sensations without requiring expensive hydraulic systems.
The gaming industry might develop specialized controllers that work alongside the robotic tail, creating new genre possibilities. Imagine balance-based puzzle games where players must physically maintain equilibrium to solve challenges, or action games where proper stance affects character performance.
Professional training simulations could also benefit from this technology. Pilots learning to handle aircraft emergencies, athletes practicing complex maneuvers, or astronauts preparing for spacewalks could all train more effectively with realistic balance feedback. The tail could simulate various gravitational conditions or equipment weights without requiring expensive specialized facilities.
Sports training applications offer another exciting frontier. Athletes could practice movements that require precise balance while receiving immediate feedback about their center of gravity. Gymnasts, figure skaters, and martial artists could refine their techniques with greater precision than traditional training methods allow.
The workplace safety applications extend beyond physical support to include training scenarios. New employees could practice hazardous tasks safely while the robotic tail prevents falls or injuries during the learning process. This could significantly reduce workplace accidents and insurance costs across multiple industries.
Advanced robotics research might also benefit from studying how the tail interacts with human movement patterns, potentially leading to improved humanoid robot designs.
https://www.youtube.com/watch?v=b4oQ1M1NkDs
Current Development Stage and Future Commercialization Plans
The robotic tail represents a significant step forward in human augmentation technology, though it remains firmly in the prototype phase. Japanese researchers continue refining their design to address practical challenges that stand between laboratory testing and real-world application.
Prototype Refinement Goals
Developers focus on four critical areas to advance their robotic tail from prototype to viable product. The current version requires substantial improvements in size reduction, weight optimization, adaptability enhancement, and everyday usability. Engineers work to miniaturize components without sacrificing functionality, recognizing that bulky assistive devices often face user resistance. Weight reduction remains equally important since heavy augmentation systems can create new balance issues rather than solve existing ones.
The adaptability challenge proves particularly complex, as the device must respond to diverse user movements and environmental conditions. Current prototypes show promise in controlled settings, but real-world scenarios demand more sophisticated sensing and response capabilities. Much like innovations in liquid robotics, this technology requires adaptive systems that can respond dynamically to changing conditions.
Commercialization Timeline and Market Considerations
No official commercialization date exists for the robotic tail, reflecting the careful approach researchers take with human augmentation technologies. The development timeline depends on resolving technical challenges while ensuring safety standards meet regulatory requirements across different markets.
This cautious progression mirrors trends in other breakthrough technologies, where practical applications often take years to reach consumers. Recent innovations like assistive mobility devices demonstrate how augmentation technologies evolve from experimental concepts to practical solutions through iterative development.
The human augmentation market continues expanding, driven by aging populations and increased interest in performance enhancement. However, successful commercialization requires more than technical capability. User acceptance, cost effectiveness, and integration with existing healthcare systems all influence market readiness.
Current research efforts connect to broader human augmentation initiatives exploring various enhancement possibilities. Scientists investigate everything from mobility enhancement technologies to advanced tool integration systems. These parallel developments create a foundation for eventual market introduction of robotic tail technology.
The prototype phase allows researchers to gather essential user feedback and safety data. This information guides design iterations and helps establish performance benchmarks for commercial versions. While immediate availability remains unlikely, the steady progress in human augmentation research suggests robotic tail technology will eventually transition from laboratory curiosity to practical assistive device.
Sources:
World Economic Forum – Japanese researchers have created a robotic tail to help …
Silicon Republic – This ‘cyborg’ tail for elderly people will help them keep their …
Designboom – ‘arque’ is a robotic tail that improves human agility and …
Inside Edition – This Robotic Tail Could Help People With Balance Problems
Geeky Gadgets – Arque Human Robotic Tail designed to enhance our balance
Instagram Reel – Researchers at Keio University in Japan have developed a wearable robotic tail called “Arque,” designed to improve human balance.
Africanews – Robotic tail for humans? [Sci Tech]
